
- Casa
- Productos
- Sobre nosotros
- Noticias
- Galería
- Garantía de calidad
- Contáctenos
 Español
Español  |

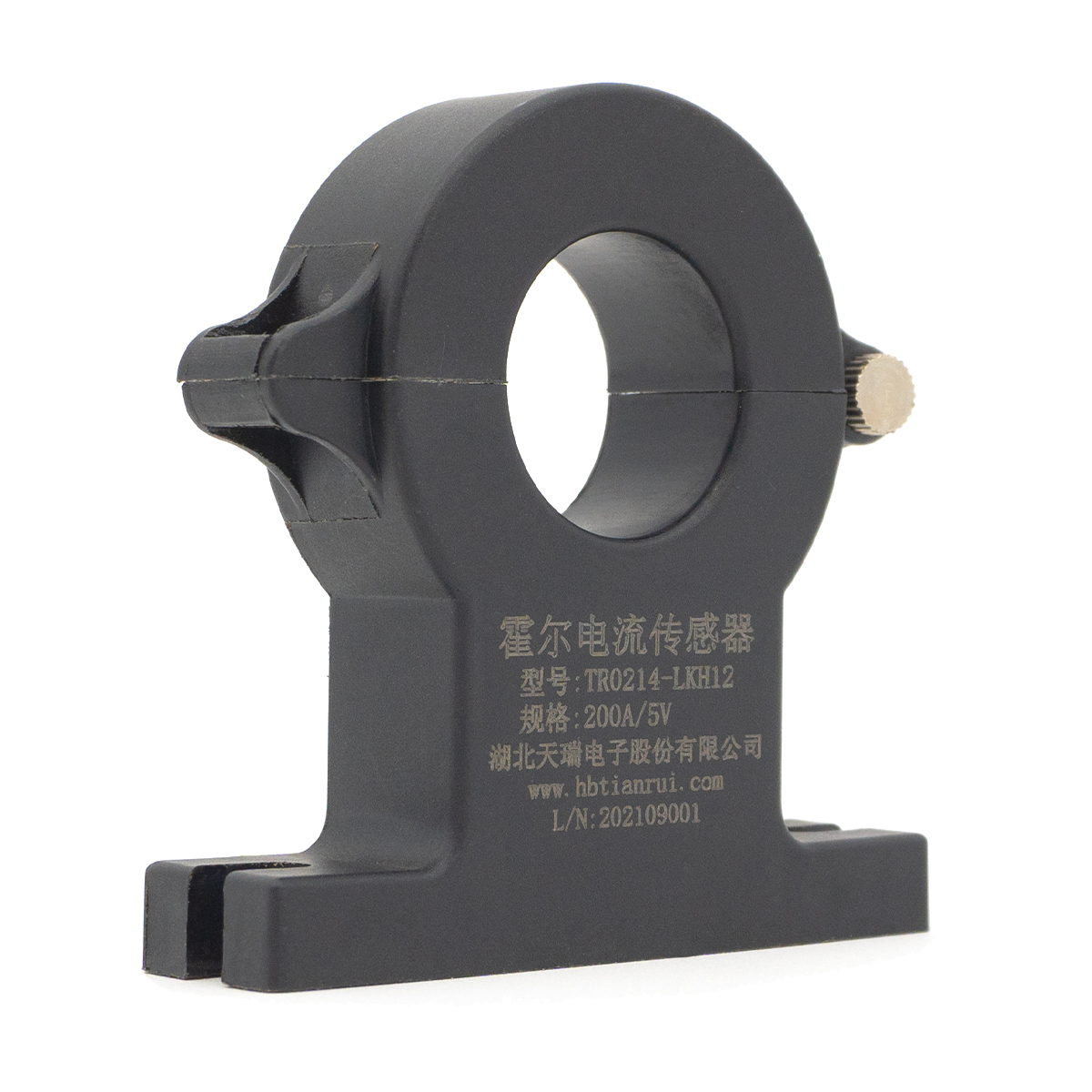










TR0214-LKH
TR
* Mide las señales de CA, CC y pulsado
* Excelente precisión, buena linealidad
* Fuerte resistencia a la interferencia externa, alta relación de rechazo de modo común
* Drift a baja temperatura, bajo consumo de energía, amplia banda de frecuencia
* Estructura dividida, fácil de instalar
* Regulación de velocidad de conversión de frecuencia de CA
* Servo Motor Traction
* Fuente de alimentación ininterrumpida (UPS)
* Máquina de soldadura, fuente de alimentación de la batería
* Mide las señales de CA, CC y pulsado
* Excelente precisión, buena linealidad
* Fuerte resistencia a la interferencia externa, alta relación de rechazo de modo común
* Drift a baja temperatura, bajo consumo de energía, amplia banda de frecuencia
* Estructura dividida, fácil de instalar
* Regulación de velocidad de conversión de frecuencia de CA
* Servo Motor Traction
* Fuente de alimentación ininterrumpida (UPS)
* Máquina de soldadura, fuente de alimentación de la batería

